
搜索结果: 1-15 共查到“国际动态 工业机器人技术”相关记录66条 . 查询时间(2.264 秒)
2023年11月5日至9日,国际机构学和机器科学联合会 (International Federation for the Promotion of Mechanism and Machine Science, 以下简称“IFToMM”) 第十六届世界大会 (16th IFToMM World Congress) 在日本东京召开。本届大会上,南方科技大学机械与能源工程系戴建生院士被授予“IFToM...

近日,工学院权龙哲教授智能农田管理装备团队连续在国际权威期刊《Soil & Tillage Research》(IF=7.4,中科院一区,TOP),《Computers and Electronics in Agriculture》(IF=8.3,中科院一区,TOP),《Biosystems Engineering》(IF=5.1,中科院一区,TOP)、《Frontiers in Plant Sc...
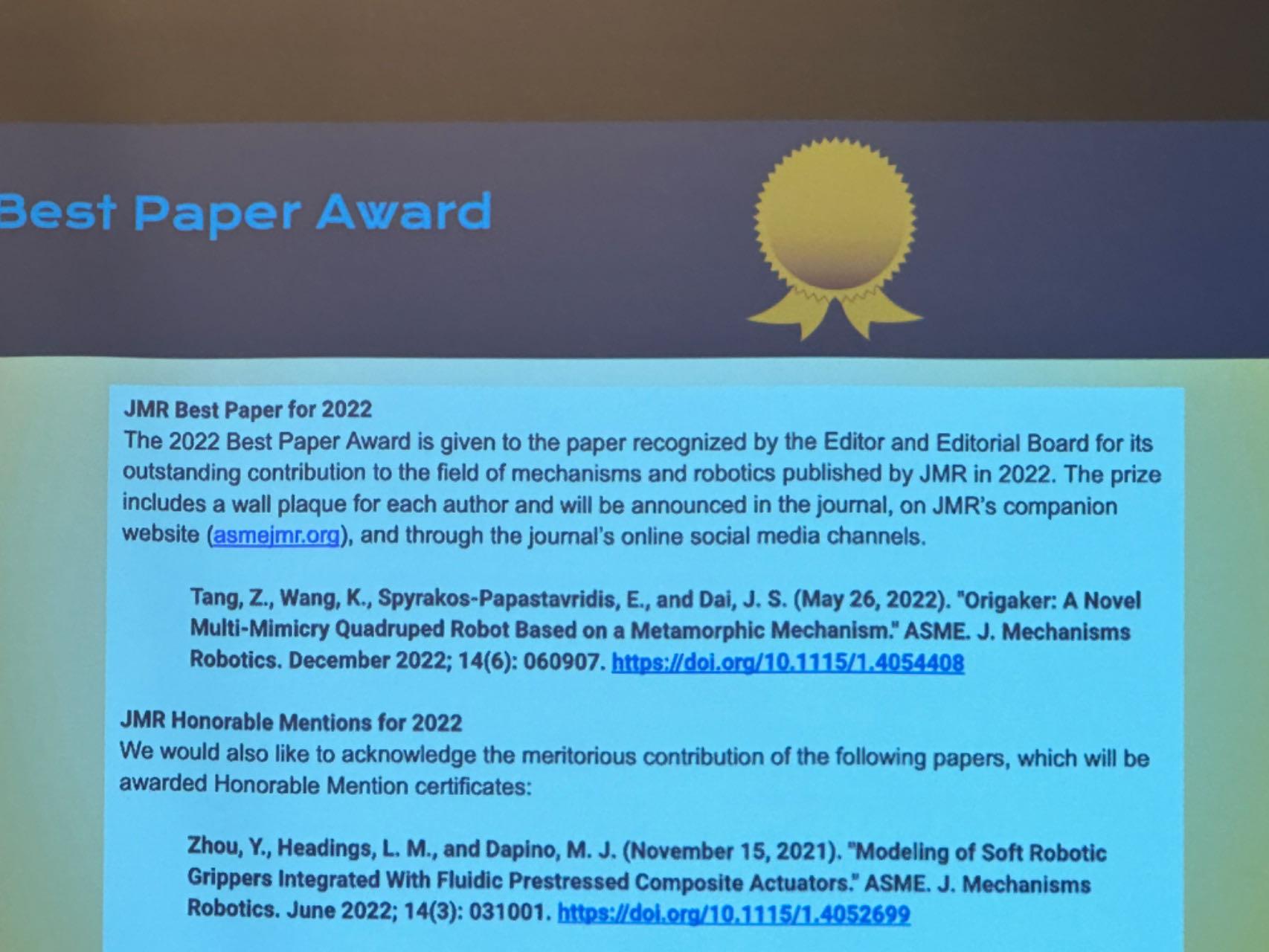
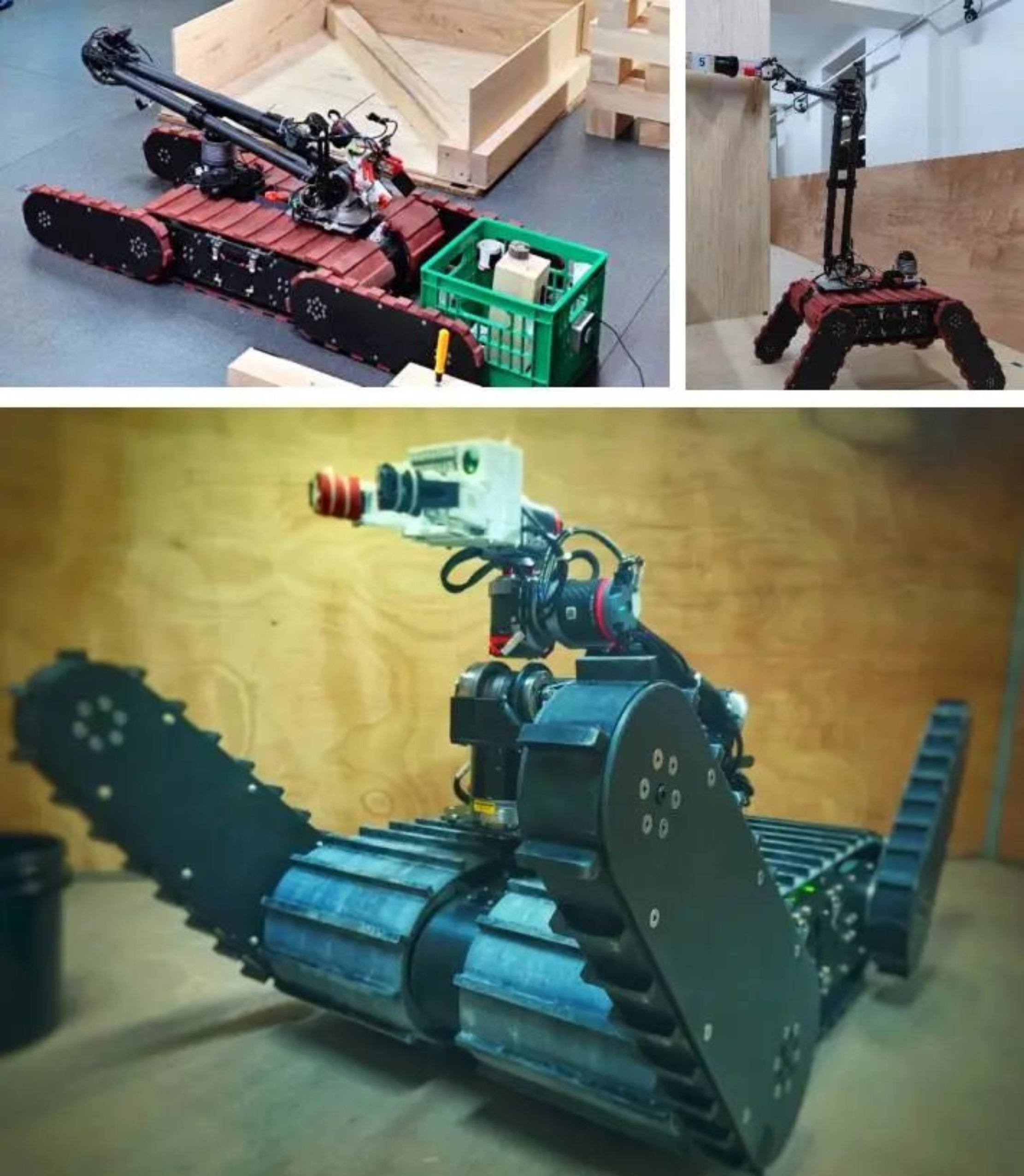
近日,国际机构学与机器人学领域顶级期刊ASME Transactions: Journal of Mechanisms and Robotics在第47届机构学与机器人学大会上宣布,南方科技大学机械与能源工程系唐昭博士和戴建生院士有关类生物变胞机器人期刊文章 “Origaker: A Novel Multi-Mimicry Quadruped Robot Based on a Metamorphi...

2023年5月18日,科技部“战略性科技创新合作”重点专项“一带一路”合作项目科技成果“应急救援机器人”交接仪式以线上和线下相结合的方式举行。黎巴嫩民防总局局长Raymond Khattar准将、黎巴嫩贝鲁特美国大学工程和建筑学院副院长Imad Elhajj教授、中国驻黎巴嫩大使馆大使钱敏坚,中国科学技术部国际合作司一级巡视员王蓉芳、亚非处处长肖蔚、三级调研员李鸿炜,中国科学技术交流中心项目主管栾...
两项世界冠军!智胜机器人世界杯!(图)
世界冠军 2022年机器人世界杯 救援机器人 NuBot机器人团队 国防科技大学
2022/7/24
“我们是世界冠军!”在得知获得2022年机器人世界杯(RoboCup)救援机器人的两项世界冠军之后,国防科技大学智能科学学院NuBot机器人团队成员发出了这样的呐喊。这是国防科技大学在该赛事上取得的最好成绩,也实现了我国在这些项目上的突破。

近日,由国际机构学与机器科学联合会(International Federation for the Promotion of Mechanism and Machine Science, 简称IFToMM)秘书处获悉,中国机械工程学会荣誉理事、天津大学黄田教授荣获IFToMM荣誉会员奖(IFToMM Honorary Member Award),IFToMM主席Andres Kecskemeth...
2021年7月15日,由美国国家标准与技术研究院(NIST)举办的2021年度面向工业自动化的敏捷机器人集群国际挑战赛(Agile Robotics for Industrial Automation Competition,ARIAC)发布了比赛结果,经过初赛、决赛两轮角逐,中国科学院沈阳自动化研究所工业控制网络与系统研究室边缘计算与边缘智能课题组Reaper团队在比赛中获得冠军。
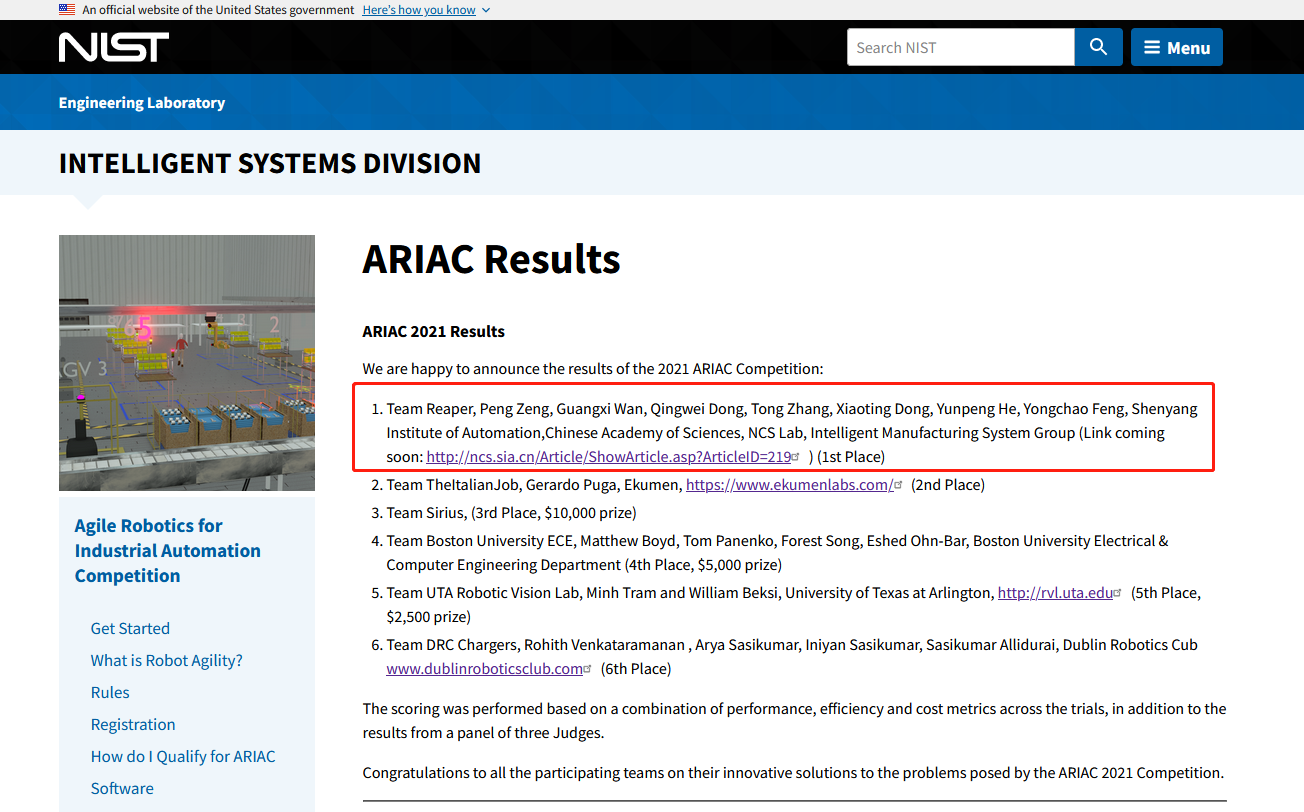
2021年7月15日,由美国国家标准与技术研究院(NIST)举办的2021年度ARIAC(Agile Robotics for Industrial Automation Competition)面向工业自动化的敏捷机器人集群国际挑战赛发布了比赛结果,经过初赛、决赛二轮激烈角逐,中国科学院沈阳自动化研究所工业控制网络与系统研究室边缘计算与边缘智能课...
俄开发出可以假乱真的人形机器人
俄 人形 机器人
2021/3/31
在俄罗斯符拉迪沃斯托克,俄国内最大的自动服务机器人制造商Promobot为人形机器人研制出了“活生生”的眼睛、柔软的皮肤和头发,使得人形机器人拥有了逼真的外观,可以假乱真。

我国首个人工智能领域国际技术标准化机构获批成立(图)
人工智能 国际技术标准化机构 电力机器人
2023/1/17
近日,由中国电机工程学会代表我国发起的电力机器人技术委员会提案通过国际电工委员会(IEC)标准管理局第170次会议审议,正式获批成立。这是我国牵头成立的首个人工智能领域国际标准化机构,是我国在IEC自主发起成立的第八个技术委员会,将不仅推动我国电力技术自主创新、加快智能装备“走出去”,还将为全球电力机器人产业的技术进步提供有力支撑
加美联合开发人工智能自动化材料发现平台
加美 人工智能 自动化材料 平台
2021/3/1
据多伦多大学官网报道,由该校和美国西北大学组成的研究团队,利用机器学习技术开发了一个自动化材料发现平台,有助于加快材料的设计周期。相关论文已在《自然-机器智能》(Nature Machine Intelligence)上发表。网状框架是通过在不同拓扑结构中分子构建块的自组装而形成的结晶多孔材料,其中许多具有气体存储、分离、催化以及生物医学等应用所需的特性。研究团队开发了一种由超分子变体自编码器支持...

Researchers at Columbia Engineering have introduced a new type of robotic finger with a sense of touch. It can localize touch with very high precision over a large, multi-curved surface, muc...

Researchers make reconfigurable robots from self-folding kirigami metamaterials
reconfigurable robots self-folding kirigami metamaterials
2020/1/19
North Carolina State University researchers funded by the National Science Foundation have demonstrated how kirigami-inspired techniques can be used to design thin sheets of material that au...

Machine learning algorithms can sometimes do a great job with a little help from human expertise, at least in the field of materials science.In many specialized areas of science, engineering and medic...

Robot arm 'tastes' with engineered bacteria(图)
Robot arm engineered bacteria University of California
2019/10/23
A robotic gripping arm that uses engineered bacteria to "taste" for a specific chemical has been developed by engineers at the University of California, Davis, and Carnegie Mellon University. The grip...